David Held (Carnegie Mellon) - Relational Affordance Learning for Robot Manipulation
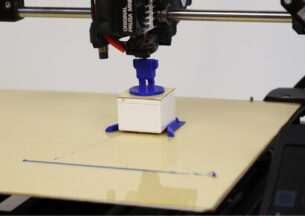
Robots today are typically confined to interact with rigid, opaque objects with known object models. However, the objects in our daily lives are often non-rigid, can be transparent or reflective, and are diverse in shape and appearance. I argue that, to enhance the capabilities of robots, we should develop perception methods that consider what robots need to know to interact with the world. Specifically, I will present novel perception methods that reason about object relational affordances; these estimated relational affordances can enable robots to perform complex tasks such as manipulating cloth, articulated objects, and grasping transparent and reflective objects. We also show how we can use such relational affordances to generalize to unseen objects in a category from a small number of demonstrations by learning to focus on the important parts of the objects in the demonstration. By reasoning about relational affordances, we can significantly improve our progress on difficult robots tasks.
Speakers

David Held
David Held is an assistant professor at Carnegie Mellon University in the Robotics Institute and is the director of the RPAD lab: Robots Perceiving And Doing. His research focuses on perceptual robot learning, i.e. developing new methods at the intersection of robot perception and planning for robots to learn to interact with novel, perceptually challenging, and deformable objects. Prior to coming to CMU, David was a post-doctoral researcher at U.C. Berkeley, and he completed his Ph.D. in Computer Science at Stanford University. David also has a B.S. and M.S. in Mechanical Engineering at MIT. David is a recipient of the Google Faculty Research Award in 2017 and the NSF CAREER Award in 2021.